 Proponha uma correção, faça uma sugestão
Proponha uma correção, faça uma sugestão



A navegação nos submarinos da classe Tridente
Nos dias de hoje, conhecer a nossa posição está ao alcance de uma simples aplicação de posicionamento no nosso telemóvel (usualmente designada por GPS). Esta tecnologia do dia-a-dia está dependente da «simples» recepção dos sinais transmitidos pela constelação de satélites de um sistema GNSS (Global Navigation Satellite System), seja ele o GPS (EUA), GLONASS (Rússia), GALILEO (Europa) ou outro.
Mas e se não conseguirmos receber estes sinais por estarmos aos 100, 200 ou 300 metros de profundidade no meio do oceano? Como é que a bordo de um submarino conseguimos saber a nossa posição e para onde temos que nos dirigir para chegar ao destino?
Autor: Comandante Paulo Garcia | Co-Autor: Filipe Taveira Pinto

Os submarinos podem navegar de três formas: à superfície, à cota periscópica (quando em imersão, a uma profundidade que permita ter os mastros fora de água, nomeadamente o periscópio) ou em imersão profunda.
Quando a navegar à superfície ou à cota periscópica, o submarino orienta-se com recurso aos mesmos sistemas que qualquer outro navio ou embarcação: através da Geonavegação (que recorre à observação de conhecenças em terra) ou da Radionavegação (recorrendo à recepção e cálculo da propagação de ondas electromagnéticas, como as dos satélites GPS).

A dificuldade surge quando o submarino se encontra em imersão profunda e já não pode recorrer a um daqueles dois sistemas de navegação. Assim, nesta situação, os submarinos utilizam a chamada Navegação Estimada, baseando-se apenas nos sensores próprios para a determinação da sua posição.
É nestes sensores, e no sistema que compila todos os dados por eles gerados, que reside a extraordinária tecnologia que permite aos submarinos da classe Tridente navegarem com erros de posicionamento irrisórios mesmos sem recurso ao GPS.

Sensores e Sistemas
Para garantir a precisão do posicionamento em imersão profunda, é fundamental recorrer a sensores precisos e algoritmos eficazes para medir e tratar todos os dados disponíveis.
Da parte dos sensores existentes a bordo dos submarinos da classe Tridente, uns são mais comuns e aplicados noutros «veículos», mas outros são bem mais específicos ou até mesmo desenvolvidos exclusivamente para este tipo de submarinos.
Odómetro electromagnético (EMLog)
Um odómetro é um equipamento que se limita a medir a distância percorrida o que, em conjunto com o tempo decorrido, determina a velocidade praticada. No caso dos nossos submarinos, este odómetro faz a medição da distância percorrida através das variações provocadas pela passagem da água num campo eletromagnético criado numa «espada». A informação resultante é a velocidade e distância percorrida em relação à água (STW - Speed Through Water), por oposição à relativa ao fundo do mar.

Sonar Doppler Log
Este outro odómetro, por sua vez, utiliza uma transmissão acústica direcionada para o fundo que, através do efeito de Doppler do eco da transmissão, consegue calcular a velocidade que o submarino está a fazer em relação ao fundo (SOG - Speed Over Ground). Além da sua da sua utilização estar limitada a certas profundidades ao fundo, dependente do alcance daquela transmissão acústica, é uma transmissão acústica que poderá comprometer a detecção do submarino.

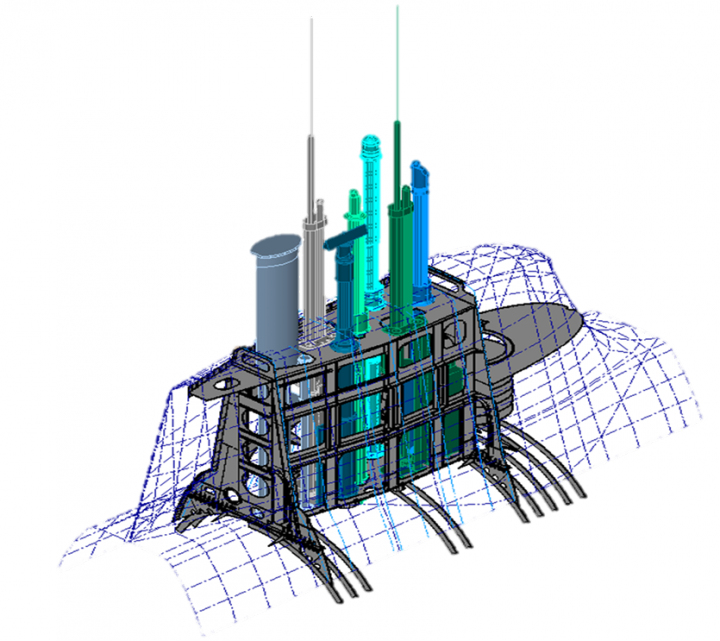
Marine Inertial Navigation System (MINS)
Os submarinos da classe Tridente estão equipados com dois sistemas inerciais, em que cada um é constituído por 3 acelerómetros e 3 Ring Laser Gyro (RLG), dispostos em cada um dos eixos (x, y e z). Este sistema calcula a proa do submarino relativa ao Norte, conseguindo, através da diferença de fase do raio laser à chegada e do movimento dos acelerómetros, detectar os ínfimos movimentos do submarino. Com estes equipamentos de extrema precisão, consegue-se obter uma estima muito aproximada à posição real do submarino.

Global Positioning System (GPS)
Estes nossos submarinos estão equipados com dois receptores GPS, com capacidade de receber um sinal de correcção, designado por Diferencial GPS, e do código militar designado por Precise Positioning Service (PPS). Com estes dois serviços, a posição determinada a bordo dos nossos submarinos consegue atingir uma extraordinária precisão sempre que utilizado o sistema GPS. Para a recepção do sinal dos satélites, torna-se naturalmente necessário ter uma antena acima da linha de água o que, como já referido, é uma indiscrição que poderá não ser aceitável em todas as circunstâncias.
Navigation Module (NavModule ou µNav)
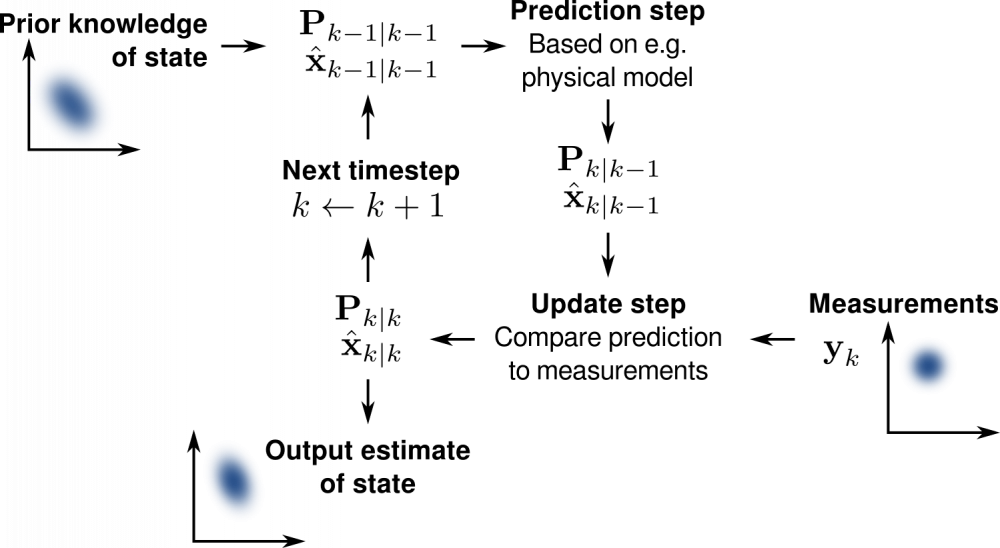
Como derradeiro sistema de determinação da posição, temos um equipamento que apesar de não fazer qualquer medição, é o principal na disponibilização da posição do submarino aos restantes sistemas. Este equipamento integra todos os valores determinados pelos sensores de bordo anteriormente descritos, acrescentando o regime de motor, os ângulos dos lemes vertical e horizontal assim como outros dados da consola de governo. A cada um destes dados são atribuídos pesos específicos no algoritmo de cálculo da posição final que, através da utilização de filtros de Kalman, calcula uma posição estimada com um erro ainda menor que cada sensor individualmente, sendo esta a posição distribuída a todos os outros sistemas.
Navigation Data Management Centre (NDMC)
A informação de todos equipamentos e sistemas mencionados é gerida e distribuída através de um sistema central, constituído por dois bastidores. Estes bastidores apresentam diversos tipos de redundâncias de forma a garantir a salvaguarda de toda a informação relativa à navegação e à posição do submarino em caso de alguma falha.

Considerando o fluxo constante de dados e a importância do seu atempado tratamento, o NDMC é gerido por um SO do tipo Real-Time Operating System (RTOS), com o objectivo principal de garantir a entrega dos dados de forma consistente no tempo.
Este sistema central pode ser operado através de quatro consolas touch panel e outras cinco adicionais com capacidade apenas de consulta e monitorização. Esta consolas, que não são mais do que simples computadores com o Windows XP embedded, encontram-se distribuídas pelos vários compartimentos do submarino, permitindo observar os diferentes dados de navegação como os relativos à posição, proa, velocidade, profundidade e outros.

Navigation Commander Console
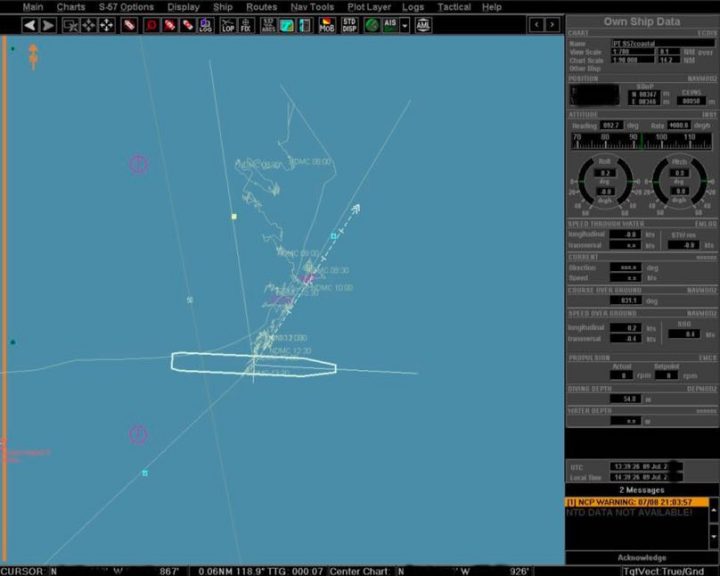
Esta consola, posicionada no meio do centro de operações do submarino, constitui-se como o sistema central de compilação e disponibilização de dados, servindo como ferramenta de apoio à decisão do comandante ou do oficial que conduz as operações do submarino. É um sistema designado por Electronic Chart Display and Information System (ECDIS), permitindo a condução da navegação e apresentação a posição do submarino georreferenciada numa Carta Electrónica de Navegação (ENC).
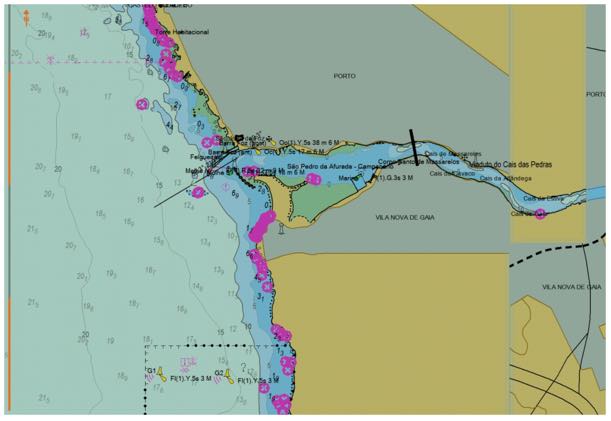
Para além da posição geográfica do submarino, este sistema recebe informação calculada do posicionamento dos contactos detectados pelos sonares do submarino, permitindo assim ter todo o panorama tático e de navegação em cima de um «mapa». Este sistema foi também adaptado às necessidades específicas de um submarino, incorporando ferramentas de controlo das áreas atribuídas (para evitar interferência entre vários submarinos), exibição de outros navios nas proximidades que estejam a transmitir com o sistema AIS e os detectados pelo radar, assim como os planeamentos de lançamento das armas (torpedo e míssil).
Tal como descrito anteriormente, o sistema de navegação é constituído por um conjunto de equipamentos e sistemas que quando integrados permitem aos submarinos da classe Tridente navegar com grande precisão, conhecendo em permanência a sua posição. Tudo isto sem a necessidade de cometer qualquer indiscrição ao içar um mastro para receber o sinal GPS.
Se considerarmos a diversidade e complexidade de forças que um corpo mergulhado nas profundidades dos oceanos pode sofrer, facilmente se percebe a dificuldade da tarefa de conseguir estimar a sua posição passado um longo período de tempo. Um extraordinário exemplo desta complexidade revela-se no Estreito de Gibraltar, o qual com as suas correntes, fazem deste um local desafiante para atravessar em imersão profunda, não fora a existência destes complexos sistemas que, desta forma, revelam a sua inestimável importância e utilidade.
Este artigo tem mais de um ano















Bom artigo……bastante interessante e um pouco fora do âmbito normal do site, embora com vários pontos de contacto.
Os meus parabéns e o meu obrigado pela vossa disponibilidade.
Abraço
Artigo divulgado 🙂
Venha o próximo 🙂
Muito bom artigo 🙂
Sem dúvida 🙂
http://www.forumdefesa.com/forum/index.php?topic=294.2655
Espetáculo 🙂
Boa tarde
Sou piloto privado e estive um tempo na mercante do brasil ..estou pesquisando como era feita a a navegacao submersa na 1 e 2 guerra..pois a bussula daria leitura errada devido a estrutura de metal do sub.
Att
é normal dar-se este tipo de informações com tanto detalhe relativamente a uma embarcação de defesa do nosso território?
Essa informação é técnica, disponível em cada tecnologia usada, não é um segredo das embarcações. Está disponível ao público, apenas desta forma, directa, precisa e compilada, é dada a conhecer com o detalhe necessário.
Nada disto é novo…e so falam dos sistemas internos, não falam em procedimentos e coisas do genero.
windows xp???
bsod!!!
hahahaha tou a brincar o Windows XP embedded é bastante fiavel mas num submarino…
quem vai fazer reset?
🙂 pois, mas se bem nos lembramos, foi dos Windows mais estáveis e duradouros, onde a Microsoft teve grandes dificuldades em “desafiar” os utilizadores a deixar para migrarem para o Vista e posteriormente para o 7. No submarino, onde visitei e coloquei essa questão ao comandante, existem equipamentos essenciais que só funcionam com windows XP, à data de fabrico o windows em funcionamento, a sua actualização poderá demorar até se perceber que noutra plataforma corre com a mesma confiança e fiabilidade, além dos custos que são enormes, segundo percebi.
Dentro do submarino vi Windows, Linux e macOS… e muita redundância de sistemas.
Só por curiosidade, qual a função dos macs? Eram os pcs dos marinheiros?
O problema do Windows XP num submarino é que não sei como é que conseguem fazer “sair e entrar” quando o sistema bloqueia 🙂 🙂
Não é Windows Xp, é Windows XP embedded, não tem nada a ver com o XP que conheces.
Eu sabia que o facto de visitar o blog diariamente, teria frutos. BOM ARTIGO.
Agora que tal um artigo sobre as fragatas MECO !!, apesar de já com alguma idade, é o que temos de melhorzinho, nao ?
Entre apreender algo sobre navegação e “semear batatas em Marte”, a minha escolha é óbvia. Já nao falando de contar espermatozóides.
Bom Artigo, quer continuação.
Deixo uma pergunta: Por uma das fotos, vè-se claramente o mastro do periscópio, é assim como as antenas, um factor de ” como já referido, é uma indiscrição que poderá não ser aceitável em todas as circunstâncias”, a minha curiosidade é saber se o dito, é ÓPTICO (espelhos), ou é uma Câmara de video ?
Já agora outra pergunta, e se um “tipo”, levar uma pen com um virus para dentro do submarino, aquilo tem proteçao e redundância suficiente, certo ?
Boa tarde,
Os nossos submarinos tem um mastro optrónico e um periscópio. Cada um tem as suas capacidades e valências. Este assunto será abordado num futuro artigo, mas desde já digo que têm as duas “modalidades” (óptico e várias câmaras de video).
Quanto à pen com vírus, tudo é possível. Não há nenhum sistema completamente seguro.
E quem te disse que podes ligar a pen aos sistemas de navegação e armamento?
“” se um “tipo”, levar uma pen com um virus para dentro do submarino””
A segurança” informática” não é so software…. em uma empresa não se pode ter “servidores” no meio da sala, devem ter acesso físico controlado.
bom artigo.
o windows funciona em consolas, não é o coração da embarcação! e ninguém vai lá ligar uma pen com um virus!
Para mim, são informarções “Confidenciais”, que qualquer submarinísta não a deve de publicar aqui.
São assuntos, que só dizem respeito, a quem tem o curso de submarinos.
Então se é uma compilação de material que está disponível ao público, porque não pode estar aqui publicado?