 Proponha uma correção, faça uma sugestão
Proponha uma correção, faça uma sugestão



Análise: Drone Walkera QR X350 Pro, para filmagem a sério
A possibilidade de captar imagem ou vídeo de alta resolução em locais de difícil acesso ou de altitude considerável é hoje uma realidade. Um trabalho que utilize um recurso deste tipo tem mais valor, desperta mais a atenção de quem o vê e permite captar uma infinidade de planos.
Com uma autonomia de cerca de 25 minutos, GPS, estabilização da câmara, navegação automática e muito mais, o Drone Walkera QR X350 Pro poderá ser a escolha certa para quem quer fazer filmagem à séria.

O drone Walkera QR X350 Pro, cedido pela Ideias Marcianas para análise, é um quadricóptero de um nível já bastante avançado, podendo mesmo ser considerado como um drone para profissionais mas que, na verdade, pode ser explorado por qualquer aventureiro neste novo mundo.
Características e funcionalidades
O drone tem uma dimensão de 28,9 x 28,9 x 20,5 cm e pesa 986 gramas. Tem GPS, giroscópio, acelerómetro e bússola. A autonomia é suportada por uma bateria de 5200 mAh 3S que promete voos de aproximadamente 25 minutos. O alcance máximo de controlo é de 2km e de transmissão de vídeo é de 800m, com as antenas originais.
Dentro da caixa deste drone, que se encontra à venda em Portugal em algumas lojas comuns, existem todos os elementos necessários ao voo, como as pás das hélices, os apoios de aterragem, a bateria e ainda o comando de controlo à distância com suporte para FPV. Tem um suporte para a câmara com estabilização (Gimbal Walkera G-2D), com controlo a duas dimensões, que permite controlar remotamente a orientação da câmara e traz também algumas chaves para fazer manutenção do drone.
Na caixa vem incluído:
- 1 drone
- 1 controlo remoto
- 1 bateria para o drone (5200 mAh,11,1V 3S)
- 1 bateria para o controlo remoto (800 mAh, 7,4V 3S)
- 1 carregador de baterias
- 1 Gimbal Walkera G-2D
- 8 hélices
- 2 pés duplos (trém de aterragem)
- 4 parafusos para o trém de aterragem
- 4 parafusos para as hélices
- Várias chaves, peças e cabos para montagem
- Transmissor de imagem Devention TX5804 para GoPro
- 3 cabos para funcionalidades avançadas
- 1 correia de suporte ao controlo remoto
Poderá ver com mais pormenor todo o conteúdo da caixa através do vídeo abaixo.
Especificações
Montagem
Embora este seja um drone já com alguma relevância na utilização a nível profissional, a sua montagem é relativamente simples e em cerca de 10 a 15 minutos o drone estará completamente montado. O manual deverá ser seguido à risca, para que nada seja deixado para trás, e todos os fios deverão ficar devidamente acondicionados para diminuir o risco de ficar preso nalgum local.
No seguinte vídeo está demonstrado todo o processo de montagem.
Ligar o drone
Para ligar o drone é necessário, primeiro que tudo e de forma manual, ligar o conector da bateria ao conector do drone para que o aparelho seja alimentado. Diga-se que, embora seja um processo típico neste tipo de aparelhos, é bastante rudimentar e nada prático.
No momento de arranque, o drone fica num estado de espera à procura de um controlo remoto que também esteja a ser ligado naquele momento... e é nesse momento que também o controlo remoto deve ser ligado. A este processo chama-se "binding". Assim que comece a haver comunicação entre ambos, o Gimbal deverá reagir e ajustar a sua posição de acordo com a posição no controlo remoto. Logo de seguida deve ser feita uma calibração da bússola, de acordo com o manual (não referido no vídeo), somente quando o LED esquerdo piscar muito rapidamente.
Note-se que a transmissão de vídeo (5,8 GHz) é independente do controlo do drone (2,4 GHz), pelo que a imagem deverá surgir no ecrã do controlo remoto (considerando que está no mesmo canal da câmara) mesmo que o controlo não esteja em comunicação.
No vídeo abaixo está demonstrado como é feito todo o processo.
Controlo remoto Devo-F7
Este controlo remoto tem 7 canais de comunicação que permitem controlar o drone, embora não seja possível utilizar todos os controlos em simultâneo, devido à limitação do número de canais.
Pode ser utilizado com outros aviões ou helicópteros, desde que a tecnologia seja compatível (modulação DSSS), e permite configurar até 15 perfis. Tem imensos parâmetros de configuração, relevantes para utilizadores exigentes mas demasiados para quem está a começar.
O Devo-F7 é também designado por Combo devido a possuir FPV e controlo num só. O FPV recorre ao ecrã a cores de 3,5".
No vídeo abaixo pode ver um pouco do que o Devo-F7 tem para oferecer.
Controlo
Como em qualquer drone, mesmo os de brincar, a utilização deste tipo de gadgets implica sempre algum treino e habilidade no manuseamento dos joysticks do controlo remoto. Digamos que não é "às primeiras" que se consegue dominar o drone, pelo menos para quem não está habituado a fazê-lo mas, com alguns minutos de prática (e algumas recargas da bateria), conseguirá levá-lo onde quer.
Se quer ter um bom drone para filmagem mas nunca experimentou controlar um, então recomendo vivamente que adquira um drone de 40 a 50€ para se ambientar com o controlo e perceber como será num drone a sério.

Após experimemtar o drone Syma X5SW e passar depois para este Walkera QR X350 Pro, devo dizer que o Walkera é mais exigente, tem mais sensibilidade e os movimentos em geral são mais bruscos, dada a maior potência dos motores. No entanto, a habituação é rápida e a possibilidade de recorrer a funcionalidades como a estabilização são muito bem-vindas.
Para iniciar o voo, por razões de segurança, os motores não estão prontos a funcionar assim que o controlo remoto se liga ao drone. Primeiro é necessário desbloqueá-los e, para o fazer, basta colocar o joystick esquerdo no canto inferior esquerdo durante 2 segundos. A partir daí, já é possível subir o throttle e começar a "acelerar". Depois, para voltar a bloquear os motores, basta deixar o drone com os motores desligados durante 15 segundos ou então colocar o joystick esquerdo no canto inferior direito.
Mesmo que o throttle seja colocado rapidamente da posição mínima para a máxima, o drone acelera progressivamente enquanto está a descolar do solo. Já no ar, é possível desligar os motores... mas pode correr mal!! Veja mais abaixo.
Significado dos LEDs
Na parte de trás do drone existem 2 LEDs verdes que servem para dar indicações de estado. O LED esquerdo indica vários estados dependendo da forma como pisca:
- Piscar lento: o drone está a iniciar (demora cerca de 15 segundos) ou tem falta de bateria
- Piscar rápido: os motores estão a ser bloqueados/desbloqueados (duração de 1 segundo) ou está a decorrer o processo de calibração da bússola (pisca continuamente)
- Desligado fixo: os motores estão bloqueados e o drone está pronto a funcionar, após desbloquear
- Ligado fixo: os motores estão desbloqueados e bastar acelerar para iniciar a rotação dos motores
Quanto ao LED da direita, indica apenas o estado do GPS. Se estiverem fixados menos de 6 satélites, o LED não pisca, para 6 satélites pisca uma vez, para 7 duas vezes, e assim sucessivamente até piscar 8 vezes indicando 13 satélites fixos.
Modos de controlo
Existem 2 modos de controlo principais: modo 1 e modo 2. Considerando os eixos de orientação RPY, no modo 1 o joystick esquerdo acelera/desacelera com o movimento cima/baixo, orienta-se segundo o eixo Yaw com o movimento esquerda/direita, e no joystick direito orienta-se segundo o eixo Pitch com cima/baixo e Roll com esquerda/direita. Ao alternar para o modo 2, o eixo Roll é trocado com o eixo Yaw.
Modos de voo
Existe ainda o FMOD, Flight-Mode ou modo de voo. Uma das tarefas mais difíceis no controlo do drone, pelo menos para mim, é conseguir orientar devidamente o drone quando ele não está a apontar na direcção para onde estou a olhar, mas sim para outros lados. Ora, imaginando que está a apontar para mim, todos os movimentos (frente, trás, esquerda e direita) estão invertidos, ou seja, se o quiser trazer para perto de mim, terei de deslocar para a frente, e se quiser para a esquerda terei de deslocar para a direita... E a questão piora quando se perde a noção do local para onde o drone está virado!
Para combater essa dificuldade e facilitar o controlo durante a captação de imagens, é possível redefinir o modo de voo e, em vez de a direcção de voo ser relativa ao nariz do drone, passa a ser relativa à direcção inicial aquando do binding (ligação ao controlo remoto). Dessa forma, independentemente da orientação do drone, desloca-se no espaço sempre como se estivessemos a deslocar uma cruz sobre um mapa.
Modo de estabilização
Se o drone se encontra numa boa posição e apenas é necessário mantê-lo estável, essa é uma tarefa um pouco difícil se for efectuada manualmente. No entanto, é possível recorrer ao modo de estabilização, colocando o switch MIX na posição 1.
Dessa forma o drone vai manter-se estável o máximo possível, com uma oscilação máxima de 1 a 2 metros (dependendo do vento), e continua a ser possível reorientar a câmara e rodar o drone, que fica somente "fixo" às coordenadas globais.
Regresso à base
Se não quer ter trabalho, se perdeu o drone de vista ou se simplesmente tem mais que fazer que trazer o drone manualmente até si, então basta utilizar o modo automático de regresso à base que ele aterra automaticamente junto ao ponto de partida.
Para tal, basta apenas colocar o switch MIX na posição 2 e o drone começa na sua jornada até ao ponto de partida, com uma precisão muito boa. Em 5 vezes que este processo foi testado, o desvio em relação ao ponto de partida num foi superior a 1,5m.
Plano de voo pré-definido, recorrendo ao mapa
Além das funcionalidades oficiais, há um mundo para explorar no que diz respeito aos drones. Concretamente, e graças ao programador Michael Oborne, existe uma aplicação que permite, entre outras coisas, configurar parâmetros do drone e definir planos de voo (rotas com pontos de passagem).
O software chama-se Mission Planner e é de código aberto.
Como exemplo, criei o percurso da imagem abaixo.
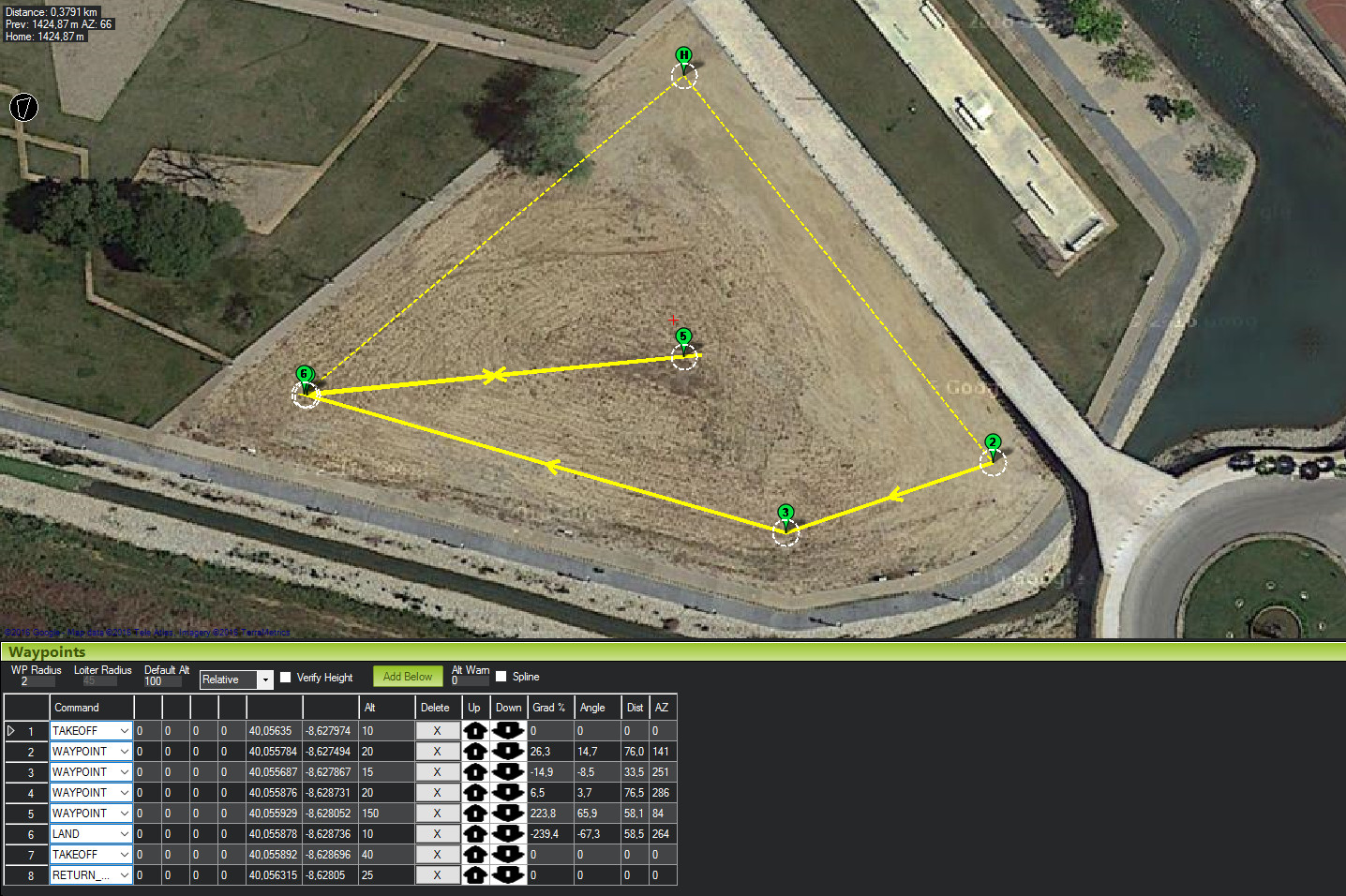
Ao iniciar a execução do percurso pela primeira vez e observar que o drone o faz na perfeição, bem alinhado e estável, é de deixar "a boca aberta". Mas o percurso é um pouco arrojado, já que tem uma aterragem seguida de descolagem e depois nova aterragem, de tal forma que... assim que a aterra (no ponto 6 de imagem), já não volta a descolar. Foi assim detectada uma limitação dos planos de voo.
Queda!
É verdade, o drone caiu!
Como já disse acima, é possível (!!) desligar os motores durante o voo, algo que supostamente não deveria acontecer, onde pelo menos deviam garantir sempre o equilíbrio do drone.
Seja como for, num voo alto onde a percepção do movimento das hélices deixou de ser evidente, e numa intenção de o trazer rapidamente para baixo, o throttle foi colocado de tal forma baixo que chegou inadvertidamente ao mínimo e os motores desligaram. O drone tombou imediatamente, com as patas para o ar, e os motores foram logo reactivados para que o drone estabilizasse. Surpresa das surpresas, o drone não conseguiu recuperar e nem aparentou estar a esforçar-se para o fazer, já que caiu direitinho no chão, com as hélices bem paralelas.
No vídeo seguinte podem ser vistos exemplos de controlo do drone.
Filmagem
O drone Walkera QR X350 Pro não inclui câmara mas vem preparado para mais que uma alternativa. Se por acaso já tem uma câmara GoPro, então pode aproveitá-la e utilizar para isso o emissor Devention TX5804 que já vem incluído. De outra forma, pode adquirir a câmara da Walkera, a iLook ou iLook+ HD, esta última ao preço de aproximadamente 150€, que é a câmara em teste.
O atraso na imagem que pode ser vista no ecrã do controlo remoto relativamente à realidade é muito curto, de aproximadamente 200ms, pelo que se pode considerar muito bom para o propósito pretendido. É possível notar um deslocamento na imagem apresentada (ver aqui) onde é possível notar que existem números cortados na parte de baixo. Ora, esses números são indicadores de posição dos diversos joysticks e potenciómetro, pelo que é informação útil que fica perdida. Foi colocada a versão mais recente de firmware na câmara iLook+ que, ainda assim, não tem esse problema resolvido (que é bem conhecido nos fóruns).
Qualidade de imagem
A câmara Walkera iLook+ é FullHD e o vídeo é gravado num cartão microSD. A câmara é alimentada pelo drone e é também possível utilizar um canal do controlo remoto para iniciar/parar a gravação de vídeo ou capturar uma foto.
No geral, a qualidade da imagem capturada é boa e a exposição é compensada correctamente perante diferentes situações de luminosidade. No que diz respeito a estabilização, esta câmara não tem qualquer mecanismo desse tipo e a vibração e outras instabilidades são filtradas apenas pelo Gimbal e pelas borrachas.
Em diversas situações os resultados não são os melhores. Pontualmente é até possível notar um efeito de ondulação na imagem, que dificilmente conseguirá ser eliminado com mecanismos de correcção da estabilização em pós-edição.
Abaixo poderá ver o resultado de gravação com a câmara iLook+.
Procedimentos avançados
À parte do simples voo e gravação de vídeo, existem imensos parâmetros avançados que podem ser configurados, quer a partir das configurações do controlo remoto quer no próprio drone, ligando-o para isso ao PC a partir da porta microUSB.
ID fixo
Tal como foi explicado acima, e que pode também ser visto no vídeo #2, no momento em que o drone ou o controlo remoto são ligados é feita a ligação entre um e outro, de modo a estabelecerem comunicação e o controlo não ser "roubado" por outra pessoa durante o voo.
No entanto, esse é um processo que pode ser ultrapassado utilizando a funcionalidade de ID fixo. Esta funcionalidade consiste em, após ter sido feito o binding automático, definir um ID code para ser utilizado daqui em diante, evitando assim a necessidade de fazer sempre o binding. Para configurar o ID fixo, a partir do controlo remoto, basta ir a Menu > Model Menu > Fixed ID e mudar o Status para On. Depois basta escolher o código pretendido, que terá a função de uma espécie de palavra-passe.
Assim, além do precesso de ligar o drone + controlo remoto ser mais rápido, é possível reestabelecer a ligação automaticamente no caso de ser perdido o alcance ou de um dos dispositivos ser desligado.

Iniciar/parar gravação ou capturar foto a partir do controlo remoto
A câmara Walkera iLook+, além de ter um botão que permite iniciar/parar gravação ou capturar foto, tem também a possibilidade de o fazer a partir da interface utilizada para alimentação, onde num cabo com 4 condutores, apenas 2 são para alimentação e sobram outros 2 para esta funcionalidade. Se não tivesse esta possibilidade, com seria possível tirar um foto no ar?!
No entanto, o adaptador que o permite fazer não é fornecido juntamente com o drone, sendo assim necessário adquiri-lo separadamente. Esse adaptador chama-se FP Convertor e está disponível em várias lojas online. No meu caso em concreto, adquiri no eBay por cerca de 5€.
Para utilizar essa funcionalidade é necessário um canal de comunicação, pelo que terá de abdicar de um dos 3 já em uso: posição da câmara, FMOD (modo de voo) ou MIX (estabilização e regresso à base).
Decidi inutilizar a funcionalidade FMOD e passei a utilizar o switch Gear para capturar a foto ou iniciar/parar a gravação. Foi necessário ligar o adaptador FP Convertor no receptor do drone (RX703A) e reconfigurar os outputs no controlo remoto. Note-se que a informação que consta no manual para fazer este processo está errada, pelo que se necessitar de ajuda, poderá solicitar nos comentários.
Ajuste importante de configurações
O drone tem dezenas de parâmetros que são possíveis de configurar, todos eles já com uma configuração definida por omissão. No entanto, há parâmetros que não têm a configuração mais correcta.

Destacam-se então 4 configurações que devem ser alteradas. Para as alterar deverá utilizar a aplicação Mission Planner, disponível para Windows, ligar o drone ao PC via USB (não é necessário ligar a bateria do drone), fazer a ligação na porta correcta (baud rate de 57600), e ir a Config/Tuning > Full Parameter List. Antes de fazer qualquer alteração, faça uma cópia de segurança das configurações actuais, clicando em Save.
- FS_BATT_VOLTAGE = 10.5 - esta é a variável que define a tensão mínima da bateria a partir da qual o drone deve parar a sua operação. Está definida por omissão para 10.7V, mas 10.5V é um valor muito seguro e dá algum tempo adicional de voo.
- FS_BATT_ENABLE = 2 - por omissão, quando é atingido o valor mínimo de tensão (10.5V), o drone aterra automaticamente. Ora... e se estiver sobre a água? Assim, esse valor inicialmente definido para 1 (Land), deverá ser definido para 2 (RTL) para regressar ao ponto de partida em vez de aterrar.
- RTL_ALT = 2500 - quando o drone está a regressar à base, não faz o percurso inverso, mas sim o mais directo. Supondo que existem árvores ou casas, não vai querer que o drone colida com elas. Assim, um valor que estava definido para 1500 (15 metros), poderá ser aumentado para 2500 (25 metros) ou mais, se assim entender, para que o drone regresse à base a uma altitude superior. Se definir o valor 0, regressará à base utilizando a altitude actual.
- WP_YAW_BEHAVIOR = 3 - este parâmetro define a orientação do "nariz" do drone enquanto regressa à base. Por omissão está definido com o valor 2 (Face next waypoint except RTL) e dessa forma irá ficar com a orientação inalterada. Para que tenha o "nariz" sempre virado para o caminho que percorre, o valor deve ser mudado para 3 (Face along GPS course).
Depois de redefinir estes ou outros parâmetros, deverá clicar em "Write Params" para guardar as alterações no drone.
Poderá depois explorar outras configurações, já que a maior parte dos parâmetros tem uma pequena explicação acerca do que faz e das opções de configuração existentes.
Veredicto
O Walkera QR X350 Pro revelou ser muito competente na maior parte das tarefas, mostrando que consegue cumprir as funcionalidades que apresenta e pelas quais se faz valer. É muito rápido, o Gimbal tem um bom desempenho e o GPS é um recurso fenomenal para permitir o regresso à base e fazer planos de voo.

No que diz respeito ao alcance, a distância máxima de controlo rondará de facto os 2km prometidos, no entanto a transmissão de vídeo, que refere 800 metros, começa a falhar a partir dos 300~400 metros, utilizando a antena fornecida com a câmara Walkera iLook+. É possível que o acessório de transmissão incluído, que serve para a GoPro, tenha maior alcance, no entanto não nos foi possível testar.
Quanto à autonomia, todas as cargas passaram de mais de 20 minutos de autonomia, no entanto esse valor é variável, dependendo obviamente do esforço que se pede do drone. Um voo onde esteja estabilizado a filmar é bem mais económico de um voo onde esteja sempre em deslocação.
Se quer fazer filmagens artísticas com o drone, captar fotos em locais únicos e fazer tudo isso com rigor e boa qualidade, então este drone Walkera é uma boa alternativa.
Este artigo tem mais de um ano
















Uma análise muito completa e rigorosa! Muitos parabéns Hugo Cura está aqui um trabalho muito profissional!
Artigos desta profundidade são uma enorme mais valia para os leitores do pplware!
Por acaso quero comprar um, mas ainda estou a espera que os valores descam, a tecnologia ainda e muito recente
(peco desculpa pela falta de acentos)
É um bom drone (para amadores em video aereo), mas não vale os 700 que a ideias marcianas pede (se é que eles o vendem).
Ele está por menos de 400 em 3 ou 4 sites (gearbest, bang good, walkera…), e mesmo assim, não é dos melhores do mundo por esse preço.
Contudo, acho muito bem a divulgação deste tipo de equipamento! Fico a espera de umas reviews drones racing com fpv (a sério ahah) ou uns yuneec / phantom 😉 ou quem sabe, mesmo mini drones! Aquele Hubson x4 fpv até a minha namorada acha fofinho!
Bom trabalho 🙂
Muito bom o review, parabéns.
Não é por mal mas, não há fotos do estado em que ficou depois da queda?
Sim, há fotos:
– foto 1
– foto 2
As mazelas no corpo do drone não causam qualquer problema.
No Gimbal partiram-se algumas peças, outras racharam, cortaram-se alguns fios e desligaram-se do interior de um dos motores (no ponto onde estavam soldados). Ainda vou tentar reparar o estrago. Soldar os fios aos condutores dos enrolamentos é que pode ser mais complicado, como se pode ver aqui.
Bom dia,
Uma review sobre o drone XK Detect X380 é que era… vinha mesmo a calhar…
parecem-me muito parecido.. Poucas diferenças deve haver entre eles..
Caro Hugo,
Não consigo encontrar as indicações de como alterar os 2 modos de controlo principais: do modo 1 para o modo 2 ou vice versa. Podem-me dar uma ajuda?
Referes-te a alterar entre modos de voo (Manual/GPS/RTH) ou o modo de acelerador na esquerda ou na direita. Os modos de voo são alterados, para o caso do Devo F7 na alavanca pequena com o nome de MIX (MIX 0: Modo manual/MIX 1: Modo GPS/Loiter/MIX 2: Return to home). Quanto a alterar entre acelerador na esquerda (modo 2) ou acelerador na direita (modo 1) deve de haver tutoriais por ai 😉
Podia dizer qual o tutorial?
Olá
Eu não achei nenhum tutorial podias-me dizer algum?
Olá, vê aqui https://www.youtube.com/watch?v=WZRMvXARiPk 😀
Quando ligo o comando DEVO F7 aparece a mensagem “warning throttle stick” e fica bloqueado
só desbloqueia quando baixo o stick do lado direito, mas não consigo ligar com o DRON
Pode ajudar?