

Engenharia, alguns gramas de ouro, 200 mil células de coração de rato, uma pitada de silicone e loucura qb. Estes são os ingredientes para o primeiro robô vivo criado pelos bio-engenheiros da Universidade de Harvard.
O robô, uma raia, é o primeiro exemplo “vivo” de uma forma de vida biológica nunca antes conseguida.
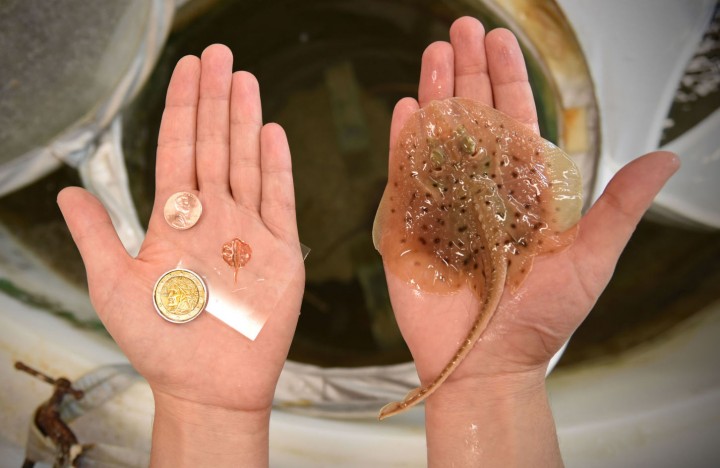
A raia robótica desenvolvida pela equipa do bioengenheiro Kit Parker, mede pouco mais de um centímetro de comprimento e pesa apenas 10 gramas. Contudo, a sua estrutura permite que deslize través do líquido com o mesmo movimento ondulante tal como as raias o fazem no oceano.
O robô é alimentado pela contracção de 200.000 células do músculo cardíaco de rato geneticamente modificadas cultivadas no lado inferior do robô. Um feito ainda mais estranho é a capacidade deste bio-robô seguir impulsos de luz brilhantes, permitindo-lhe torcer o corpo para passar em certos obstáculos. Este é um robô fascinante, tal como é descrita na revista Science.

Qual é a composição deste robô?
Os materiais, com os quais foi construída esta pequena inovação, formam um conjunto rico em imaginação mas que traz, à luz da curiosidade, muitas perguntas de como poderá o futuro próximo reagir a estes novos “seres com vida”.
A raia robô é composta por quatro camadas sequenciais de material.
Primeira camada:
A camada superior é um corpo 3D produzido em silicone (do mesmo tipo que um revestimento exterior de um implante mamário) e é desenvolvido num molde de titânio. Este corpo flexível articula-se com outros materiais em conjunto:
- Ouro que foi usado para construir o esqueleto
- Sulfato de silicone para implantes mamários que formam o corpo da raia
- Um núcleo de 200.000 células de coração de rato.
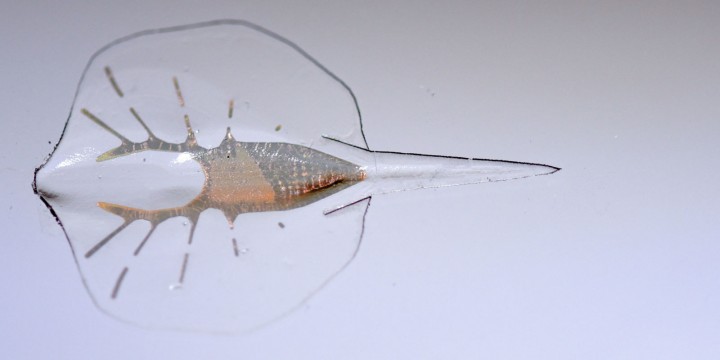
Segunda camada: A segunda camada de baixo é um simples esqueleto de ouro. Como o corpo faz um efeito ondulante, era necessário que houvesse uma estrutura que garantisse um recuo da barbatana peitoral. Assim, esta volta sempre à forma inicial.
Mas por quê o ouro? A equipa encontrou, neste material, a rigidez necessária com a flexibilidade à medida para haver o efeito dobrar e soltar. Aqui há depois muito trabalho envolvido em conceber o aspecto final, como refere Kit Parker.

Terceira camada:
A terceira camada é outra camada hiperfina de silicone. Isso impede que o músculo cardíaco tenha um contacto directo com o ouro, além de ter outro papel fundamental nesta estrutura que, juntamente com a de cima feita em 3D, obriga a que o crescimento do músculo cardíaco se desenvolva à medida das expectativas da equipa. Assim obtêm um desenho geométrico direito e orientado.
Quarta camada:
Por fim, no lado de baixo do robô, são colocadas, em camadas, células de ratos vivos. Estas foram células geneticamente modificadas e são originais do músculos do coração. Estas células são distribuídas em duas finas camadas em serpentina. Depois de colocadas, são feitos testes às capacidades do movimento de contracção e relaxamento das células cardíacas.
Estas células enviam um sinal ao longo das outras células, criando uma cascata de reacção do músculo que se contrai e relaxa, puxando a barbatana e, de seguida, libertando-a, executando o tal movimento ondulante, tal como as raias reais o fazem para se deslocar na água.
Para que servirá esta criação?
Basicamente tem como propósito desenvolver corações criados pela engenharia genética, por forma a que possamos ter este órgão vital produzido artificialmente.
Parker acredita que o seu robô, uma máquina construída de células animais vivas, coloque uma questão filosófica estranha: está vivo?
Eu acho que nós temos, aqui, uma forma de vida biológica. Uma máquina, mas uma forma de vida biológica. Eu não chamaria, este ser, de um organismo, porque não se pode reproduzir mas, certamente, está vivo.
Referiu Kit Parker.