A tecnologia está longe de conhecer os seus limites. Desta vez somos confrontados com um robô que consegue “derreter” o material das suas articulações que são reconfiguráveis em tempo real. Desta forma, este pequeno robô consegue evitar obstáculos.
Este tipo de “modificação” acontece nos esqueletos dos animais. São mecânicas possíveis nos ossos e há exemplos que servem de modelos.
Robô que parte os seus ossos para os voltar a soldar
Na natureza temos diferentes animais que nascem já otimizados para cenários e ações diversificadas. Assim, essa otimização é refletida nas estruturas dos seus corpos. É especialmente evidente nos esqueletos de animais projetados para se moverem em terra, onde há uma extensa diversidade de membros e articulações.
Existem algumas estruturas gerais que tendem a funcionar bem, como ter quadris, joelhos, tornozelos e pés. Contudo, se observamos a diferença entre o esqueleto de uma avestruz e o esqueleto de um elefante, teremos uma noção de como existe muito espaço de manobra.
Infelizmente para os animais, a otimização significa que, embora sejam excelentes nalgumas coisas, lutam com outras coisas, porque não são capazes de retroprojetar e reotimizar os seus esqueletos em tempo real.
Mas como funcionaria isso na realidade?
Há animais que podem mudar um pouco a sua morfologia, mas estão presos a restrições biológicas. Já os robôs têm uma maior liberdade também nesse campo. Os investigadores da Colorado State University desenvolveram um pequeno robô ambulante que pode derreter e solidificar os ossos para otimizar as suas pernas para diferentes movimentos.
Por norma, estas alterações estruturais são feitas no “modo simplificado”: cortar, colar e amarrar. Seja nas pernas, rodas, asas ou rotores, a arte é sempre a de cortar, fita-cola e avançar.
Neste caso, a abordagem é muito diferente. Para haver a tal mobilidade, flexibilidade e diversidade de recursos, o robô permite-se reconfigurar “à medida”. Isto é, ele usa o seu hardware para o adaptar às necessidades do momento. Transforma-o em tempo real.

Jianguo Zhao, investigador que se dedica a desenvolver robôs saltadores, apresentou um artigo publicado no IEEE Robotics & Automation Letters, onde descreve o novo tipo de pequeno robô reconfigurável. Desta forma, Zhao refere existe uma estrutura plástica que pode ser seletivamente derretida e endurecida rapidamente, alterando as configurações das juntas e o movimento resultante.
Os investigadores chamam a isso de “forma de metamorfose nas juntas”, embora o investigador refira que é mais simples entender isto como os “ossos” que partem e soldam à medida das necessidades.
Articulações feitas em PLA
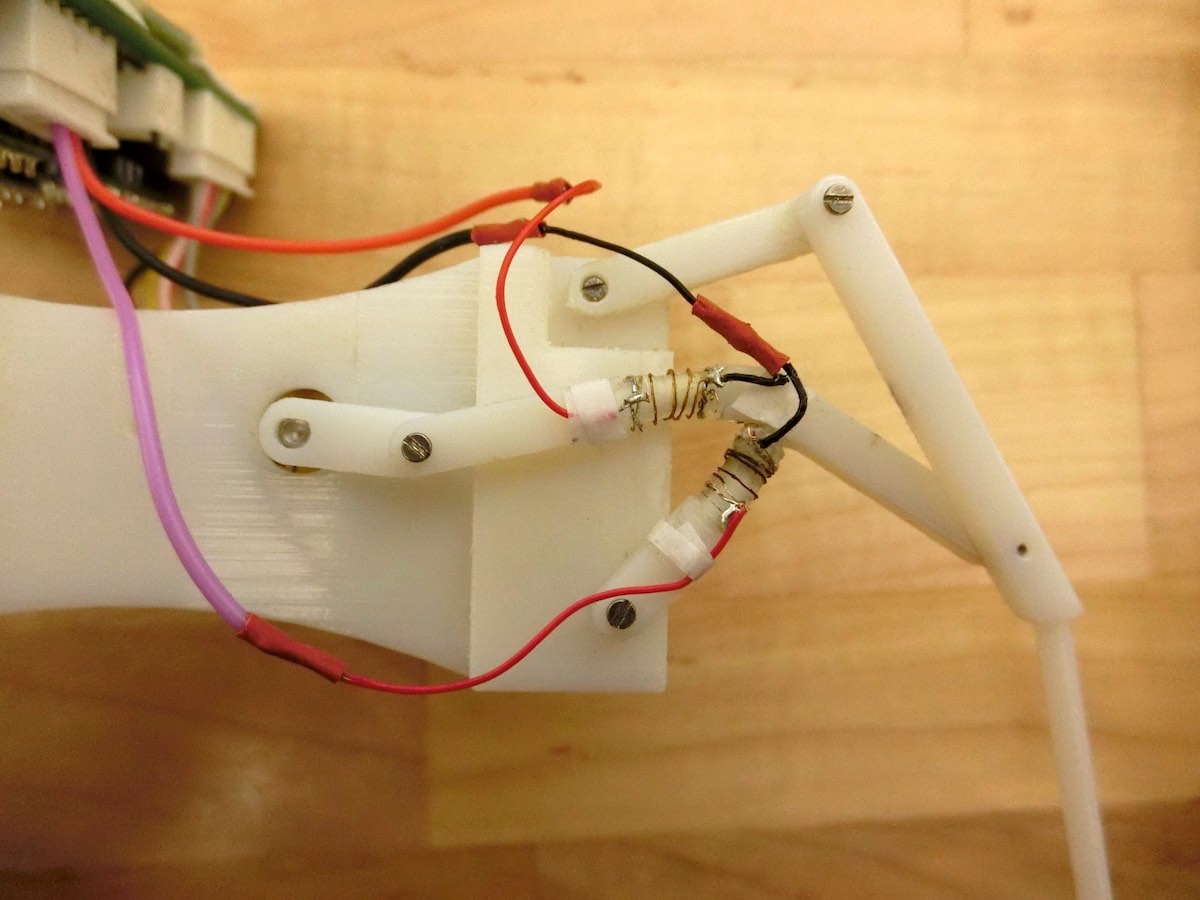
Demora pouco mais de 10 segundos para amolecer o PLA. Este é o material que foi usado nas articulações do robô. Desta forma, as juntas são enroladas num fio que aquece quando é aplicada tensão. Uma capa de silicone mantém o PLA na sua forma convencional. Depois, tal como podemos ver no vídeo, a juntas podem ser alteradas passando da forma rígida para mole. Isto quando recebem calor em diferentes áreas, adaptando “o membro”.
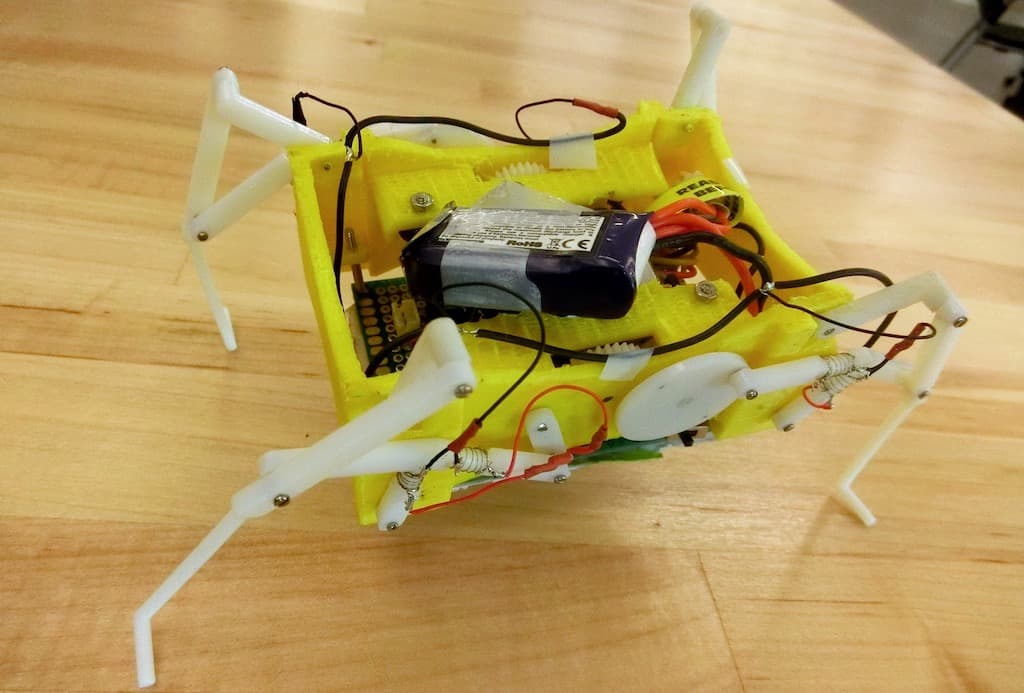
Este robô em particular é muito simples. Impresso em 3D tem apenas dois atuadores no total para se mover com 4 pernas. Contudo, o interessante será ver esta filosofia de transformação morfológica em robôs numa escala bem maior e com mais complexidade.