A possibilidade de captar imagem ou vídeo de alta resolução em locais de difícil acesso ou de altitude considerável é hoje uma realidade. Um trabalho que utilize um recurso deste tipo tem mais valor, desperta mais a atenção de quem o vê e permite captar uma infinidade de planos.
Com uma autonomia de cerca de 25 minutos, GPS, estabilização da câmara, navegação automática e muito mais, o Drone Walkera QR X350 Pro poderá ser a escolha certa para quem quer fazer filmagem à séria.

O drone Walkera QR X350 Pro, cedido pela Ideias Marcianas para análise, é um quadricóptero de um nível já bastante avançado, podendo mesmo ser considerado como um drone para profissionais mas que, na verdade, pode ser explorado por qualquer aventureiro neste novo mundo.
Características e funcionalidades
O drone tem uma dimensão de 28,9 x 28,9 x 20,5 cm e pesa 986 gramas. Tem GPS, giroscópio, acelerómetro e bússola. A autonomia é suportada por uma bateria de 5200 mAh 3S que promete voos de aproximadamente 25 minutos. O alcance máximo de controlo é de 2km e de transmissão de vídeo é de 800m, com as antenas originais.
Dentro da caixa deste drone, que se encontra à venda em Portugal em algumas lojas comuns, existem todos os elementos necessários ao voo, como as pás das hélices, os apoios de aterragem, a bateria e ainda o comando de controlo à distância com suporte para FPV. Tem um suporte para a câmara com estabilização (Gimbal Walkera G-2D), com controlo a duas dimensões, que permite controlar remotamente a orientação da câmara e traz também algumas chaves para fazer manutenção do drone.
Na caixa vem incluído:
- 1 drone
- 1 controlo remoto
- 1 bateria para o drone (5200 mAh,11,1V 3S)
- 1 bateria para o controlo remoto (800 mAh, 7,4V 3S)
- 1 carregador de baterias
- 1 Gimbal Walkera G-2D
- 8 hélices
- 2 pés duplos (trém de aterragem)
- 4 parafusos para o trém de aterragem
- 4 parafusos para as hélices
- Várias chaves, peças e cabos para montagem
- Transmissor de imagem Devention TX5804 para GoPro
- 3 cabos para funcionalidades avançadas
- 1 correia de suporte ao controlo remoto
Poderá ver com mais pormenor todo o conteúdo da caixa através do vídeo abaixo.

Especificações
Montagem
Embora este seja um drone já com alguma relevância na utilização a nível profissional, a sua montagem é relativamente simples e em cerca de 10 a 15 minutos o drone estará completamente montado. O manual deverá ser seguido à risca, para que nada seja deixado para trás, e todos os fios deverão ficar devidamente acondicionados para diminuir o risco de ficar preso nalgum local.
No seguinte vídeo está demonstrado todo o processo de montagem.

Ligar o drone
Para ligar o drone é necessário, primeiro que tudo e de forma manual, ligar o conector da bateria ao conector do drone para que o aparelho seja alimentado. Diga-se que, embora seja um processo típico neste tipo de aparelhos, é bastante rudimentar e nada prático.
No momento de arranque, o drone fica num estado de espera à procura de um controlo remoto que também esteja a ser ligado naquele momento… e é nesse momento que também o controlo remoto deve ser ligado. A este processo chama-se “binding”. Assim que comece a haver comunicação entre ambos, o Gimbal deverá reagir e ajustar a sua posição de acordo com a posição no controlo remoto. Logo de seguida deve ser feita uma calibração da bússola, de acordo com o manual (não referido no vídeo), somente quando o LED esquerdo piscar muito rapidamente.
Note-se que a transmissão de vídeo (5,8 GHz) é independente do controlo do drone (2,4 GHz), pelo que a imagem deverá surgir no ecrã do controlo remoto (considerando que está no mesmo canal da câmara) mesmo que o controlo não esteja em comunicação.
No vídeo abaixo está demonstrado como é feito todo o processo.

Controlo remoto Devo-F7
Este controlo remoto tem 7 canais de comunicação que permitem controlar o drone, embora não seja possível utilizar todos os controlos em simultâneo, devido à limitação do número de canais.
Pode ser utilizado com outros aviões ou helicópteros, desde que a tecnologia seja compatível (modulação DSSS), e permite configurar até 15 perfis. Tem imensos parâmetros de configuração, relevantes para utilizadores exigentes mas demasiados para quem está a começar.
O Devo-F7 é também designado por Combo devido a possuir FPV e controlo num só. O FPV recorre ao ecrã a cores de 3,5″.
No vídeo abaixo pode ver um pouco do que o Devo-F7 tem para oferecer.

Controlo
Como em qualquer drone, mesmo os de brincar, a utilização deste tipo de gadgets implica sempre algum treino e habilidade no manuseamento dos joysticks do controlo remoto. Digamos que não é “às primeiras” que se consegue dominar o drone, pelo menos para quem não está habituado a fazê-lo mas, com alguns minutos de prática (e algumas recargas da bateria), conseguirá levá-lo onde quer.
Se quer ter um bom drone para filmagem mas nunca experimentou controlar um, então recomendo vivamente que adquira um drone de 40 a 50€ para se ambientar com o controlo e perceber como será num drone a sério.

Após experimemtar o drone Syma X5SW e passar depois para este Walkera QR X350 Pro, devo dizer que o Walkera é mais exigente, tem mais sensibilidade e os movimentos em geral são mais bruscos, dada a maior potência dos motores. No entanto, a habituação é rápida e a possibilidade de recorrer a funcionalidades como a estabilização são muito bem-vindas.
Para iniciar o voo, por razões de segurança, os motores não estão prontos a funcionar assim que o controlo remoto se liga ao drone. Primeiro é necessário desbloqueá-los e, para o fazer, basta colocar o joystick esquerdo no canto inferior esquerdo durante 2 segundos. A partir daí, já é possível subir o throttle e começar a “acelerar”. Depois, para voltar a bloquear os motores, basta deixar o drone com os motores desligados durante 15 segundos ou então colocar o joystick esquerdo no canto inferior direito.
Mesmo que o throttle seja colocado rapidamente da posição mínima para a máxima, o drone acelera progressivamente enquanto está a descolar do solo. Já no ar, é possível desligar os motores… mas pode correr mal!! Veja mais abaixo.
Significado dos LEDs
Na parte de trás do drone existem 2 LEDs verdes que servem para dar indicações de estado. O LED esquerdo indica vários estados dependendo da forma como pisca:
- Piscar lento: o drone está a iniciar (demora cerca de 15 segundos) ou tem falta de bateria
- Piscar rápido: os motores estão a ser bloqueados/desbloqueados (duração de 1 segundo) ou está a decorrer o processo de calibração da bússola (pisca continuamente)
- Desligado fixo: os motores estão bloqueados e o drone está pronto a funcionar, após desbloquear
- Ligado fixo: os motores estão desbloqueados e bastar acelerar para iniciar a rotação dos motores
Quanto ao LED da direita, indica apenas o estado do GPS. Se estiverem fixados menos de 6 satélites, o LED não pisca, para 6 satélites pisca uma vez, para 7 duas vezes, e assim sucessivamente até piscar 8 vezes indicando 13 satélites fixos.
Modos de controlo
Existem 2 modos de controlo principais: modo 1 e modo 2. Considerando os eixos de orientação RPY, no modo 1 o joystick esquerdo acelera/desacelera com o movimento cima/baixo, orienta-se segundo o eixo Yaw com o movimento esquerda/direita, e no joystick direito orienta-se segundo o eixo Pitch com cima/baixo e Roll com esquerda/direita. Ao alternar para o modo 2, o eixo Roll é trocado com o eixo Yaw.
Modos de voo
Existe ainda o FMOD, Flight-Mode ou modo de voo. Uma das tarefas mais difíceis no controlo do drone, pelo menos para mim, é conseguir orientar devidamente o drone quando ele não está a apontar na direcção para onde estou a olhar, mas sim para outros lados. Ora, imaginando que está a apontar para mim, todos os movimentos (frente, trás, esquerda e direita) estão invertidos, ou seja, se o quiser trazer para perto de mim, terei de deslocar para a frente, e se quiser para a esquerda terei de deslocar para a direita… E a questão piora quando se perde a noção do local para onde o drone está virado!
Para combater essa dificuldade e facilitar o controlo durante a captação de imagens, é possível redefinir o modo de voo e, em vez de a direcção de voo ser relativa ao nariz do drone, passa a ser relativa à direcção inicial aquando do binding (ligação ao controlo remoto). Dessa forma, independentemente da orientação do drone, desloca-se no espaço sempre como se estivessemos a deslocar uma cruz sobre um mapa.
Modo de estabilização
Se o drone se encontra numa boa posição e apenas é necessário mantê-lo estável, essa é uma tarefa um pouco difícil se for efectuada manualmente. No entanto, é possível recorrer ao modo de estabilização, colocando o switch MIX na posição 1.
Dessa forma o drone vai manter-se estável o máximo possível, com uma oscilação máxima de 1 a 2 metros (dependendo do vento), e continua a ser possível reorientar a câmara e rodar o drone, que fica somente “fixo” às coordenadas globais.
Regresso à base
Se não quer ter trabalho, se perdeu o drone de vista ou se simplesmente tem mais que fazer que trazer o drone manualmente até si, então basta utilizar o modo automático de regresso à base que ele aterra automaticamente junto ao ponto de partida.
Para tal, basta apenas colocar o switch MIX na posição 2 e o drone começa na sua jornada até ao ponto de partida, com uma precisão muito boa. Em 5 vezes que este processo foi testado, o desvio em relação ao ponto de partida num foi superior a 1,5m.
Plano de voo pré-definido, recorrendo ao mapa
Além das funcionalidades oficiais, há um mundo para explorar no que diz respeito aos drones. Concretamente, e graças ao programador Michael Oborne, existe uma aplicação que permite, entre outras coisas, configurar parâmetros do drone e definir planos de voo (rotas com pontos de passagem).
O software chama-se Mission Planner e é de código aberto.
Como exemplo, criei o percurso da imagem abaixo.
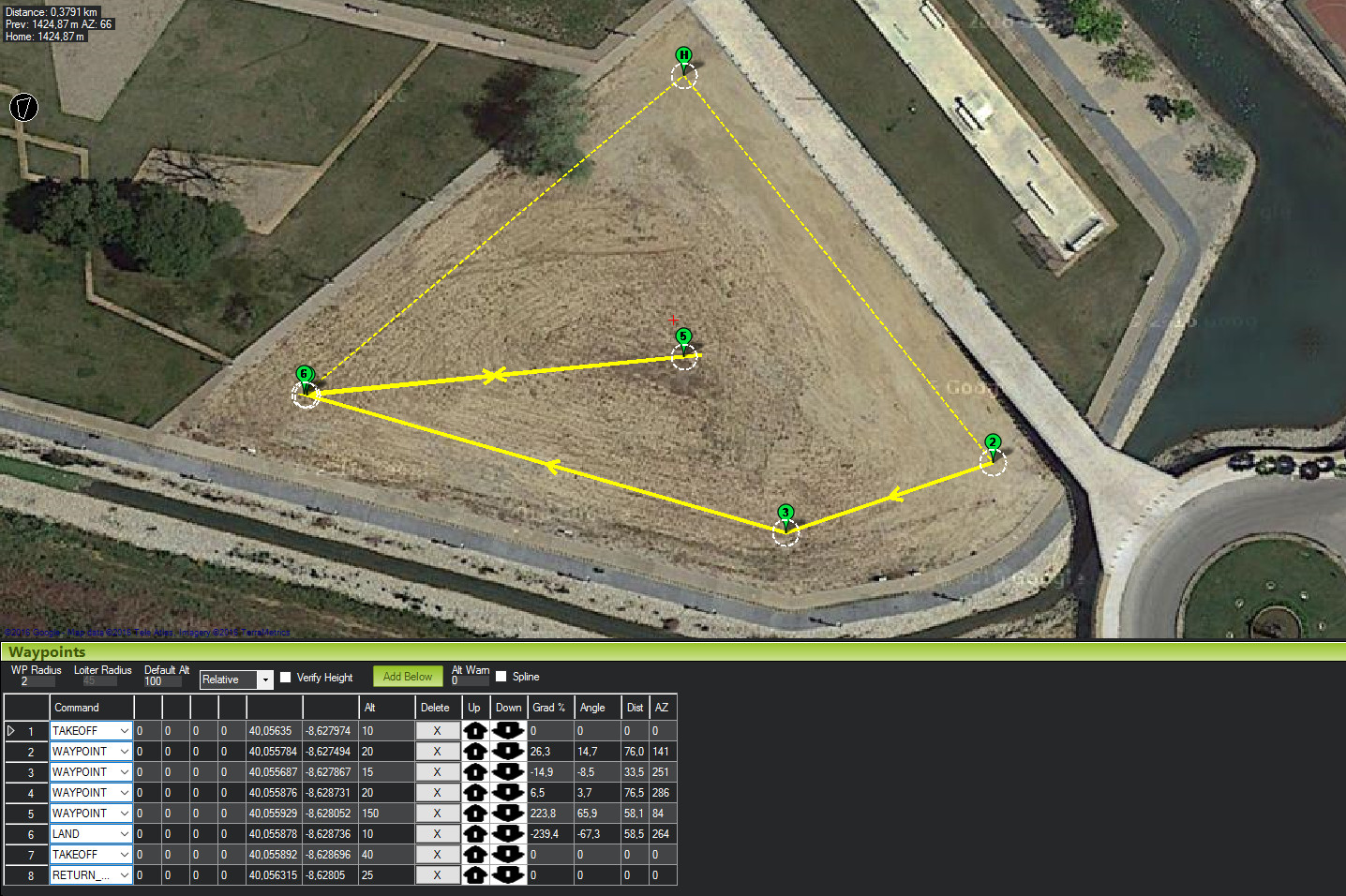
Ao iniciar a execução do percurso pela primeira vez e observar que o drone o faz na perfeição, bem alinhado e estável, é de deixar “a boca aberta”. Mas o percurso é um pouco arrojado, já que tem uma aterragem seguida de descolagem e depois nova aterragem, de tal forma que… assim que a aterra (no ponto 6 de imagem), já não volta a descolar. Foi assim detectada uma limitação dos planos de voo.
Queda!
É verdade, o drone caiu!
Como já disse acima, é possível (!!) desligar os motores durante o voo, algo que supostamente não deveria acontecer, onde pelo menos deviam garantir sempre o equilíbrio do drone.
Seja como for, num voo alto onde a percepção do movimento das hélices deixou de ser evidente, e numa intenção de o trazer rapidamente para baixo, o throttle foi colocado de tal forma baixo que chegou inadvertidamente ao mínimo e os motores desligaram. O drone tombou imediatamente, com as patas para o ar, e os motores foram logo reactivados para que o drone estabilizasse. Surpresa das surpresas, o drone não conseguiu recuperar e nem aparentou estar a esforçar-se para o fazer, já que caiu direitinho no chão, com as hélices bem paralelas.
No vídeo seguinte podem ser vistos exemplos de controlo do drone.

Filmagem
O drone Walkera QR X350 Pro não inclui câmara mas vem preparado para mais que uma alternativa. Se por acaso já tem uma câmara GoPro, então pode aproveitá-la e utilizar para isso o emissor Devention TX5804 que já vem incluído. De outra forma, pode adquirir a câmara da Walkera, a iLook ou iLook+ HD, esta última ao preço de aproximadamente 150€, que é a câmara em teste.
O atraso na imagem que pode ser vista no ecrã do controlo remoto relativamente à realidade é muito curto, de aproximadamente 200ms, pelo que se pode considerar muito bom para o propósito pretendido. É possível notar um deslocamento na imagem apresentada (ver aqui) onde é possível notar que existem números cortados na parte de baixo. Ora, esses números são indicadores de posição dos diversos joysticks e potenciómetro, pelo que é informação útil que fica perdida. Foi colocada a versão mais recente de firmware na câmara iLook+ que, ainda assim, não tem esse problema resolvido (que é bem conhecido nos fóruns).
Qualidade de imagem
A câmara Walkera iLook+ é FullHD e o vídeo é gravado num cartão microSD. A câmara é alimentada pelo drone e é também possível utilizar um canal do controlo remoto para iniciar/parar a gravação de vídeo ou capturar uma foto.
No geral, a qualidade da imagem capturada é boa e a exposição é compensada correctamente perante diferentes situações de luminosidade. No que diz respeito a estabilização, esta câmara não tem qualquer mecanismo desse tipo e a vibração e outras instabilidades são filtradas apenas pelo Gimbal e pelas borrachas.
Em diversas situações os resultados não são os melhores. Pontualmente é até possível notar um efeito de ondulação na imagem, que dificilmente conseguirá ser eliminado com mecanismos de correcção da estabilização em pós-edição.
Abaixo poderá ver o resultado de gravação com a câmara iLook+.

Procedimentos avançados
À parte do simples voo e gravação de vídeo, existem imensos parâmetros avançados que podem ser configurados, quer a partir das configurações do controlo remoto quer no próprio drone, ligando-o para isso ao PC a partir da porta microUSB.
ID fixo
Tal como foi explicado acima, e que pode também ser visto no vídeo #2, no momento em que o drone ou o controlo remoto são ligados é feita a ligação entre um e outro, de modo a estabelecerem comunicação e o controlo não ser “roubado” por outra pessoa durante o voo.
No entanto, esse é um processo que pode ser ultrapassado utilizando a funcionalidade de ID fixo. Esta funcionalidade consiste em, após ter sido feito o binding automático, definir um ID code para ser utilizado daqui em diante, evitando assim a necessidade de fazer sempre o binding. Para configurar o ID fixo, a partir do controlo remoto, basta ir a Menu > Model Menu > Fixed ID e mudar o Status para On. Depois basta escolher o código pretendido, que terá a função de uma espécie de palavra-passe.
Assim, além do precesso de ligar o drone + controlo remoto ser mais rápido, é possível reestabelecer a ligação automaticamente no caso de ser perdido o alcance ou de um dos dispositivos ser desligado.

Iniciar/parar gravação ou capturar foto a partir do controlo remoto
A câmara Walkera iLook+, além de ter um botão que permite iniciar/parar gravação ou capturar foto, tem também a possibilidade de o fazer a partir da interface utilizada para alimentação, onde num cabo com 4 condutores, apenas 2 são para alimentação e sobram outros 2 para esta funcionalidade. Se não tivesse esta possibilidade, com seria possível tirar um foto no ar?!
No entanto, o adaptador que o permite fazer não é fornecido juntamente com o drone, sendo assim necessário adquiri-lo separadamente. Esse adaptador chama-se FP Convertor e está disponível em várias lojas online. No meu caso em concreto, adquiri no eBay por cerca de 5€.
Para utilizar essa funcionalidade é necessário um canal de comunicação, pelo que terá de abdicar de um dos 3 já em uso: posição da câmara, FMOD (modo de voo) ou MIX (estabilização e regresso à base).
Decidi inutilizar a funcionalidade FMOD e passei a utilizar o switch Gear para capturar a foto ou iniciar/parar a gravação. Foi necessário ligar o adaptador FP Convertor no receptor do drone (RX703A) e reconfigurar os outputs no controlo remoto. Note-se que a informação que consta no manual para fazer este processo está errada, pelo que se necessitar de ajuda, poderá solicitar nos comentários.
Ajuste importante de configurações
O drone tem dezenas de parâmetros que são possíveis de configurar, todos eles já com uma configuração definida por omissão. No entanto, há parâmetros que não têm a configuração mais correcta.

Destacam-se então 4 configurações que devem ser alteradas. Para as alterar deverá utilizar a aplicação Mission Planner, disponível para Windows, ligar o drone ao PC via USB (não é necessário ligar a bateria do drone), fazer a ligação na porta correcta (baud rate de 57600), e ir a Config/Tuning > Full Parameter List. Antes de fazer qualquer alteração, faça uma cópia de segurança das configurações actuais, clicando em Save.
- FS_BATT_VOLTAGE = 10.5 – esta é a variável que define a tensão mínima da bateria a partir da qual o drone deve parar a sua operação. Está definida por omissão para 10.7V, mas 10.5V é um valor muito seguro e dá algum tempo adicional de voo.
- FS_BATT_ENABLE = 2 – por omissão, quando é atingido o valor mínimo de tensão (10.5V), o drone aterra automaticamente. Ora… e se estiver sobre a água? Assim, esse valor inicialmente definido para 1 (Land), deverá ser definido para 2 (RTL) para regressar ao ponto de partida em vez de aterrar.
- RTL_ALT = 2500 – quando o drone está a regressar à base, não faz o percurso inverso, mas sim o mais directo. Supondo que existem árvores ou casas, não vai querer que o drone colida com elas. Assim, um valor que estava definido para 1500 (15 metros), poderá ser aumentado para 2500 (25 metros) ou mais, se assim entender, para que o drone regresse à base a uma altitude superior. Se definir o valor 0, regressará à base utilizando a altitude actual.
- WP_YAW_BEHAVIOR = 3 – este parâmetro define a orientação do “nariz” do drone enquanto regressa à base. Por omissão está definido com o valor 2 (Face next waypoint except RTL) e dessa forma irá ficar com a orientação inalterada. Para que tenha o “nariz” sempre virado para o caminho que percorre, o valor deve ser mudado para 3 (Face along GPS course).
Depois de redefinir estes ou outros parâmetros, deverá clicar em “Write Params” para guardar as alterações no drone.
Poderá depois explorar outras configurações, já que a maior parte dos parâmetros tem uma pequena explicação acerca do que faz e das opções de configuração existentes.
Veredicto
O Walkera QR X350 Pro revelou ser muito competente na maior parte das tarefas, mostrando que consegue cumprir as funcionalidades que apresenta e pelas quais se faz valer. É muito rápido, o Gimbal tem um bom desempenho e o GPS é um recurso fenomenal para permitir o regresso à base e fazer planos de voo.

No que diz respeito ao alcance, a distância máxima de controlo rondará de facto os 2km prometidos, no entanto a transmissão de vídeo, que refere 800 metros, começa a falhar a partir dos 300~400 metros, utilizando a antena fornecida com a câmara Walkera iLook+. É possível que o acessório de transmissão incluído, que serve para a GoPro, tenha maior alcance, no entanto não nos foi possível testar.
Quanto à autonomia, todas as cargas passaram de mais de 20 minutos de autonomia, no entanto esse valor é variável, dependendo obviamente do esforço que se pede do drone. Um voo onde esteja estabilizado a filmar é bem mais económico de um voo onde esteja sempre em deslocação.
Se quer fazer filmagens artísticas com o drone, captar fotos em locais únicos e fazer tudo isso com rigor e boa qualidade, então este drone Walkera é uma boa alternativa.