
 Proponha uma correção, faça uma sugestão
Proponha uma correção, faça uma sugestão



Sistema de radar 4D da Tesla preparado para ameaças reais
A Tesla tem no mercado carros elétricos com um conjunto de sensores dos mais avançados que existem para este segmento. Assim, a empresa vende os seus produtos com a promessa que os veículos são seguros e que desempenham de forma autónoma uma série de ações, em prol da vida do condutor e dos passageiros. Nesse sentido, e com o objetivo de tornar o seu self-driving ainda mais eficiente, a Tesla pretende adicionar um novo sistema de radar 4D.
Conforme sabemos, até pelas opiniões já proferidas do seu CEO, a marca americana prefere os radares em vez do LiDAR.
Tesla prefere radares a sensores LiDAR
Conforme sabemos, Elon Musk não faz por menos. Por isso, a Tesla incluiu, desde cedo, no Autopilot e no Self-Driving um esforço extra. Isto, porque o sistema tem de estar extremamente bem preparado, a fim de garantir a segurança dos condutores. Assim, a empresa tomou a decisão de, além da visão computorizada alimentada por câmara, esta seria complementada com um sistema de radar.
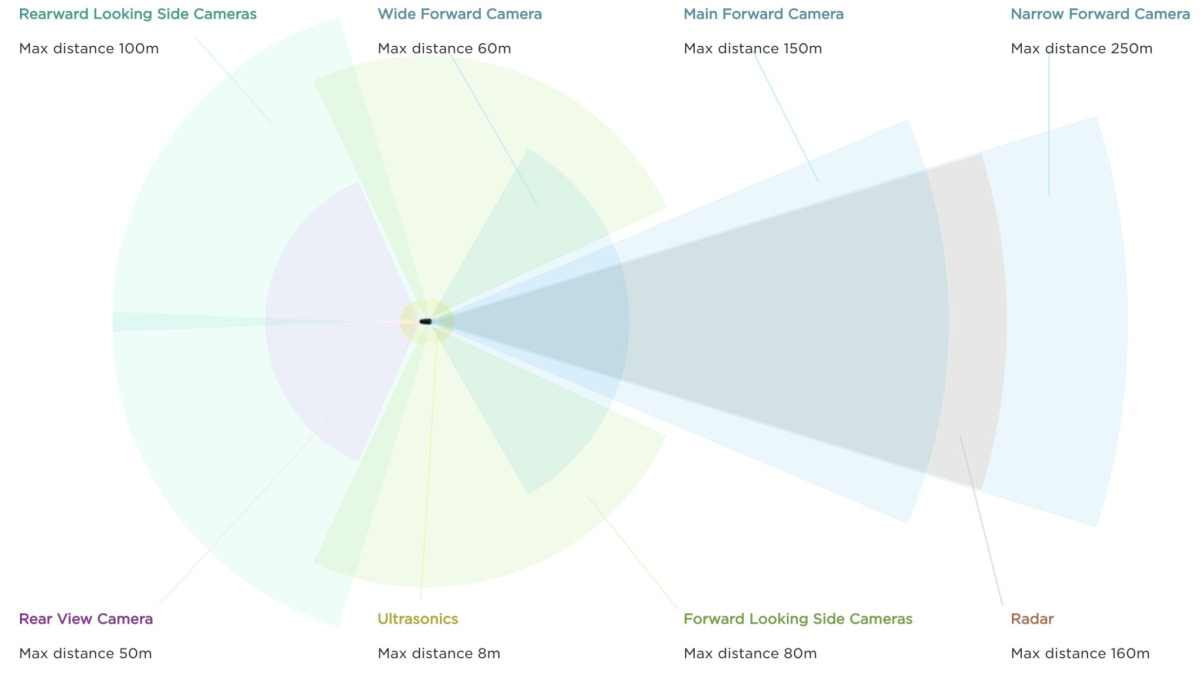
O CEO da Tesla não se cansa de dizer que não concorda com a utilização de sensores LiDAR nos sistemas de condução autónoma. Assim sendo, não faria sentido coloca-los nos seus veículos elétricos. Por isso, e não estando relacionado com o preço dos sistemas, a marca prefere apostar em 8 câmaras, em torno dos veículos, complementadas por 12 sensores ultrassónicos e um radar na parte da frente.
Aliás, todos os veículos elétricos produzidos pela Tesla desde 2016 têm sido equipados com estes sensores ou com versões idênticas.
Novo sistema de radar 4D
De acordo com a Tesla, o radar que tem vindo a ser instalado é o ARS410 da Continental, com um alcance de 170 metros. Agora, tendo em vista um upgrade do seu sistema, a empresa pretende atualizá-lo com um novo sistema de radar 4D. Isto, em parceria com uma startup de Israel chamada Arbe Robotics.
Esta indicação sobre o novo sistema de radar 4D surge a partir de duas fugas. Em primeiro lugar, o hacker do software da Tesla, conhecido como Green, revelou que a empresa adicionou, numa atualização recente, uma nova opção de radar chamada “Phoenix”. Este nada mais é do que um sistema de radar da Arbe Robotics que atende às necessidades de condução do mundo real, identificando, avaliando e lidando com cenários e ameaças reais.
Em segundo lugar, fontes revelaram que a Tesla está a preparar uma atualização do Model 3 e que dessa atualização faziam parte novos sensores.

O novo sistema de radar 4D é promissor
A Arbe Robotics descreve o seu novo sistema de radar 4D como sendo capaz de converter, processar e armazenar dados brutos, em tempo real. Além disso, consegue manter, simultaneamente, um baixo consumo de energia.
Assim, o chip de processamento do novo sistema de radar 4D gera até 48 canais de upload, juntamente com 48 canais de download. Dessa forma, geram 30 frames por segundo de uma imagem em 4D. Além disso, o sistema possui uma capacidade de processamento equivalente a 3 Tb/seg.
Com esta alteração para um novo sistema de radar 4D, o alcance do radar de um veículo elétrico da Tesla quase duplicaria para 300 metros.
Leia também:
Este artigo tem mais de um ano















Não sou entendido nessa área, mas é um sistema já perto do LIDAR mas com menor resolução. Ou seja, o Sr. Elon Musk teve de se aproximar do conceito que desprezava; poderá dar outro nome, mas mais valia dizer que afinal o caminho era outro. Mudar de ideias é próprio das pessoas inteligentes.
Isto não é um Lidar é um radar percebo que seja uma aproximaçao mas o que ele sempre disse foi que o Lidar era uma tecnologia cara e dificil de implementar num carro, portanto ficaram se pelas camaras e radares e no fundo isto continuo a ser um radar apenas é melhor
O mais certo é dentro de poucos anos ele mudar de ideias. O LIDAR vai se tornar relativamente barato e tem mais vantagens do que o Radar. Aliás a Tesla já poderia estar a usar um sistema LIDAR se tivesse apostado nessa tecnologia já que neste momento já existem empresas com soluções de fácil implementação baseadas em silício.
Não sei se sabe, mas a Spacex usa Lidar na Dragon capsule, experiença em Lidar nao falta…
Space X não é Tesla e há muitos sistema Lidar diferentes.
A questão do Elon Musk estar contra o uso do LIDAR não é apenas o custo. Ele defende, e a meu ver bem, que para atingir a autonomia total o LIDAR não é suficiente porque a infraestrutura mundial está pensada para ser interpretada por visão. Ou seja, vai ser sempre necessário resolver a parte da visão e, por isso, mais vale apostar só na parte que tem o potential para resolver o problema na totalidade, e não atalhar caminho no “beco sem saída” que é o LIDAR.
Desde quanto é que o LIDAR é um beco sem saída?
O LIDAR é muito mais informativo do que o Radar, que a Tesla usa. Mera visão com câmeras tem falhas no mapeamento tridimensional do ambiente para identificar obstáculos, é por isso que usam também o Radar. Será que achas que um carro não é capaz de usar LIDAR de forma autónoma?
@Lucas, o LIDAR é um beco sem saída porque sozinho não consegue tirar toda a informação necessária à condução totalmente autónoma. É preciso sempre resolver a parte da visão porque o LIDAR só te dá uma point cloud com informação da distancia de cada ponto. Não distingue as marcações no chão (passadeiras, zebras, etc) ou qual é o sinal que está desenhado no circulo metálico na ponta do tubo vertical.
A Tesla usa o radar para validar a distância dos obstáculos que as câmaras detectam. Não o usa para navegar nos ambientes.
Que a visão não é perfeita no mapeamento tridimensional é um facto, mas o que é certo é que há mais de um século que há um sistema autónomo nas estradas e só usa “câmaras”, e ainda por cima apenas duas. No lado do LIDAR, já existem sistemas que produzem representações detalhadas do ambiente envolvente há vários anos, mas nunca conseguiram entregar autonomia total sem ser em áreas especificas onde têm mapas detalhados pré carregados.
Mesmo não sendo perfeito, consegue-se resultados bastante bons: https://cleantechnica.com/2020/08/03/tesla-achieved-the-accuracy-of-lidar-with-its-advanced-computer-vision-tech/
O que eu vejo é a Tesla cada vez mais perto do que a Waymo tem e tudo sem usar LIDAR nem estar limitado a áreas pré mapeadas. Se isso não indica que o LIDAR está estagnado ou perto disso, então não sei o que é que significa…
:S Não sei porque é que insistes com a visão. Em lado nenhum do meu comentário disse que o LIDAR iria substituir a visão, disse que o LIDAR seria melhor solução do que o RADAR, coisa que a Tesla usa.
Uso do LIDAR não implica áreas pré-mapeadas.
Precisas de avaliar distâncias a obstáculos para poder navegar, doutra forma não sabes que velocidade usar, quando travar, etc
@Lucas, “Em lado nenhum do meu comentário disse que o LIDAR iria substituir a visão”. Então como é que não percebes que basear o sistema em LIDAR é um beco sem saída e que o que importa resolver é a parte da visão? É por isto que insisto nesta parte.
A Tesla usa o Radar para validar os objectos que as câmaras apanham, e não como base do sistema. Os carros com LIDAR também têm radar. O LIDAR, devido à natureza radial, perde definição em distâncias maiores e, por isso, é preciso o Radar para andar a velocidades de Autoestrada.
E eu sei que o LIDAR funciona sem pré mapeamento, mas o que é certo é que os testes com carros com tecnologia LIDAR estão todos a acontecer em áreas pré mapeadas. O objectivo da Tesla é ter um sistema universal, sem a necessidade de mapear e manter milhões de kms de estrada actualizados.
Aquilo a que tu chamas visão não permite avaliações precisas do espaço tridimensional, muito menos ainda a longas distâncias, é uma das razões por poderemos sofrer ilusões de óptica. Aquilo que se quer em carros autónomos é boa precisão nas estimativas que fazem.
Para usar LIDAR não é preciso ter RADAR. Já foram apresentadas soluções LIDAR que permitem resolução de espaço a distâncias equivalentes aos sistemas RADAR que são usados em carros.
Sabes que funciona e no entanto insiste na falácia.
@Lucas, aquilo a que eu chamo visão não permite avaliações precisas do espaço tridimensional, muito menos a longas distâncias. No entanto permitiu aos humanos conduzir desde sempre… No caso dos Tesla, o sistema tem mais 6 “olhos”, 1 radar e 12 sensores ultra sónicos. Não me digas que usar um LIDAR em cima da cabeça para conduzir porque a tua “visão não permite avaliações precisas do espaço tridimensional”?
E, caso não saibas, tal como a visão, o LIDAR é afectado pela distância. Ao disparar os feixes a partir do mesmo ponto (o carro), quando se aumenta a esfera (distância) mantêm se os mesmos pontos de medição. Ou seja, se tiveres um milhão de pontos, a 10m tens uns 800 pontos por m2 (1M/1256m2 de esféra), mas a 200m já só tens uns 2 pontos por m2 (1M/502654m2). Com 2 pontos por m2 é fácil não detectar logo um objecto.
O LIDAR não precisa de RADAR para funcionar, tal como a visão não precisa de RADAR para funcionar. Servem essencialmente para validar a informação principalmente a velocidades maiores.
Tu também admitiste que o LIDAR garante a autonomia total: “Em lado nenhum do meu comentário disse que o LIDAR iria substituir a visão”. Estamos juntos na “falácia”?
Eu só acho que o LIDAR (e mais ainda o RADAR) não garantem a autonomia total. Estar a apostar no LIDAR quando se tem sempre que resolver a parte da visão parece me um perda de tempo. O sistema da Tesla está a ser pensado para só usar as câmaras. O RADAR estará lá, no máximo, para validar as distâncias apuradas pela visão para os objectos mais distantes. Mais ou menos como um backup como já é para nós quando activa as travagens de emergência.
@ IonFan, sabes muito bem que um sistema automatizado não pode incorrer nos erros equivalentes dos humanos, daí nenhum carro poder depender de apenas um único tipo de sensor.
E repito, a questão é substituir o RADAR pelo LIDAR. Qual é a parte da minha afirmação que não entendes: “já foram apresentadas soluções LIDAR que permitem resolução de espaço a distâncias equivalentes aos sistemas RADAR que são usados em carros”.
” Estamos juntos na “falácia”?” Não! A tua falácia é continuares a associar LIDAR a pré mapeamento.
Não parece que a Tesla considere uma perde de tempo usar novos RADARES… pela tua lógica não deveria preocupar-se com isso!
@Lucas, porque é que um sistema automatizado não pode incorrer nos mesmos problemas? A meu ver, desde que os sistema seja estatisticamente mais seguro, se não o aceitar mos por não ser perfeito (como nenhum nunca vai ser), estamos a matar gente desnecessariamente.
Mas porque é que a Tesla haveria de querer substituir o sistema de RADAR por um sistema muito mais caro quando nenhum deles resolve a questão? Pelos vistos este sistema de radar faz um bom trabalho sem adicionar um custo extra.
Eu ignorei a parte do “já foram apresentadas soluções LIDAR que permitem resolução de espaço a distâncias equivalentes aos sistemas RADAR que são usados em carros” porque não conheço e tu não puseste nenhum exemplo.
Eu escrevi “E eu sei que o LIDAR funciona sem pré mapeamento”, por isso não sei de onde é que vem essa ideia de “A tua falácia é continuares a associar LIDAR a pré mapeamento”.
Quem associa o LIDAR ao pré mapeamento não sou eu, são as empresas que estão a usar o sistema LIDAR só em zonas pré mapeadas, como é o caso do Waymo.
Se a Tesla vai usar um novo RADAR é porque é melhor do que o que têm e não deve ser (muito) mais caro. Eu nunca disse que os radares não seriam usados. Eu disse literalmente que estará lá para validar e “Mais ou menos como um backup”.
@Lucas, eu acho que o LIDAR tem muitas vantagens nesta altura de desenvolvimento da tecnologia autónoma. Torna tudo mais fácil, mas eu vejo isso como um atalho que não vai levar ao destino final.
Além disso, o facto dos Tesla não terem um sistema tão dispendioso como um LIDAR, permitiu que fossem relativamente acessíveis e, por isso, fossem vendidos já mais de 1 milhão. Uma frota deste tamanho a recolher dados do mundo real é, na minha opinião, bem mais importante para chegar ao objectivo da autonomia.
IonFan, acho que não entendes as coisas que digo. Tecnologia LIDAR está a ter uma grande transição, vai se tornar bastante mais barata e muito mais eficaz. LIDAR não é um atalho, LIDAR é mais uma fonte de informação, que requer menos processamento do que estar a tentar interpretar informação tridimensional a partir apenas de imagens bidimensionais.
Não faz sentido querer mimitizar tudo o que a visão do homem faz quando se pode fazer mais e melhor!
Atalhos é o que o sistema de visão humana faz com a informação que tem, levando a erros de interpretação.
@Lucas, tu é que pareces não entender o que escrevo. Afinal, a discussão começou comigo a escrever que a principal razão o Elon Musk estar contra o uso do LIDAR era por não resolver o problema na totalidade, sendo preciso resolver sempre a parte da visão. Até agora já confirmaste a parte de o LIDAR não ser o suficiente: “Em lado nenhum do meu comentário disse que o LIDAR iria substituir a visão”, já só falta perceberes que a parte da visão é o que é usado desde sempre e nunca precisamos de a complementar com um LIDAR em mais de 100 anos de história de condução.
A parte de mapear a envolvente tridimensionalmente só com visão é perfeitamente possível e já se faz: https://www.researchgate.net/figure/Pseudo-LiDAR-signal-from-visual-depth-estimation-Top-left-a-KITTI-street-scene-with_fig1_329772221
Não vai ter precisão milimétrica como o LIDAR, mas não ter essa precisão nunca impediu os humanos de conduzir.
Concordo que o LIDAR oferece informação de profundidade mais precisa, mas é inútil a extrair informação de linhas da estrada, sinais de transito, semáforos, piscas dos outros carros, e tudo o que não se distingue pela profundidade. A visão vai ter sempre que ser implementada para resolver isto e, no fim, vai estar num ponto que torna as vantagens do LIDAR irrelevantes.
A somar a isto tens a questão da escalabilidade. Já imaginaste um engarrafamento em New York com centenas de carros a disparar lasers em todas as direções, incluindo na direção dos sensores dos outros carros, que era suposto só receberem o seu sinal de volta?
E a questão da fiabilidade do material? Ao contrário de uma câmara (ou de um RADAR de abertura sintética), um LIDAR tem partes móveis. São pontos de falha que vai ser necessário manter.
O LIDAR é bastante mais simples no que toca ao software, mas bem mais complicado na parte o hardware. Se alguém conseguir resultados semelhantes só com câmaras, vai ser muito mais competitivo no mercado. Cá estaremos para ver.
A bem dizer, outros sistemas de condução autónoma (como a Waymo) usam Lidar, radar, câmaras, microfones e outros sensores!
A Waymo está, neste momento, aparentemente a frente na questão da condução autónoma, já com um alguns milhões de quilómetros percorridos com veículos com condução autónoma nível 4.
@Fantasma, sem dúvida que a Waymo vai na frente. Até já está é no nível 5. Só funciona é numa cidade apenas.
O que eu acho é que atingiram uma barreira que não conseguem ultrapassar sem resolverem a parte de visão. Para mim, depois de tanto tempo a basearem o sistema no LIDAR, o facto de continuarem geofenced nas áreas mapeadas diz muito.
O geofencing, tipicamente, não é uma exigência da tecnologia. Tem a ver, por enquanto, com questões de segurança e legais.
Os de nível 4 não funcionam em apenas uma cidade. O de nível 5, segundo sabia de algum tempo atrás, estaria apenas numa localidade porque ainda está nos primeiros passos e onde obtiveram o respetivo licenciamento (nem todas as localidades estarão dispostas a permitir, por enquanto, a condução autónoma sem qualquer condutor de segurança).
O sistema da Waymo já faz coisas incríveis, mesmo perante situações completamente novas que ocorrem. Desconheço o estado da arte da Tesla. O que está disponível, hoje, para uso está ainda longe do que é atingido num nível 4 de condução autónoma, mas já é bastante interessante e será a maior frota com um cheirinho razoável do que é condução autónoma (ou assistida).
@Fantasma, o geofencing não é uma exigência da tecnologia em si, mas sim da tecnologia no estado actual.
A Waymo tem licença para testar sem condutor na California, por exemplo, mas só o testam em Phoenix. É muito bom e um passo em frente, mas não consigo deixar de pensar que estão a usar uma técnica que não resolve totalmente o problema.
Com a tecnologia actual a Waymo precisa de informação pre carregada para funcionar. Os semáforos por exemplo, estão referenciados no mapa. Em caso de obras com semáforos temporários não é garantido que o sistema o respeite. Penso que o mapeamento tridimensional foi a parte fácil (por causa do LIDAR) e agora a Waymo está a trabalhar da parte da visão que é a única forma de resolver estes casos. Lá está, a visão tem sempre que ser resolvida.
A abordagem da Tesla é diferente e o objectivo é funcionar em qualquer lado, nem que seja a primeira viatura a passar naquela estrada. Neste momento, mesmo com este novo FSD beta, mantem-se no nível 3. Mas algo me diz que com a recolha de dados a aumentar exponencialmente, vão chegar em breve ao nível 4 e, quando provarem que o sistema é estatisticamente mais seguro que um humano, ao nível 5. Neste momento há 1 milhão de carros com esta capacidade, mas no ano que vem deve quase duplicar o numero. É algo que ninguém vai conseguir ter num futuro próximo 😉
Isto é a minha opinião. Para saber como vai realmente ser, temos que esperar …
Sim, há que esperar. Tema e evolução interessante de seguir.
Penso que essa questão dos semáforos já está resolvida há algum tempo. Para além dos semáforos, penso que até já houve uma demo com o carro a “obedecer” a um “polícia sinaleiro”, o que é obra!
Não esquecer que desde muito cedo, o bundle de sensores também inclui câmaras.
Também estou curioso sobre as evoluções (significativas, não “pequenos” passos) que aguardam os Teslas. Aliás, até atendendo as promessas do Elon Musk (se bem que já falhou alguns prazos e até parece que talvez tenha sido demasiado otimista. Mas com ele nunca se sabe ao certo).
@Fantasma, é o famoso “Elon Time” 😀
Com mais ou menos atraso, o homem tem entregue, e o que não entregou está a ser trabalhado. A verdade é que me parece que está melhor. O Model Y, por exemplo, foi entregue 6 meses antes do anunciado inicialmente 😉 Vamos ver.
@Fantasma, nem de propósito! Última hora: https://www.teslarati.com/tesla-model-y-giga-berlin-deliveries-2021/
😀
Bom dia,
Não entendo nada qual o objetivo destas notícias, na passada sexta-feira só não fui abalroado por um Tesla na A3 no sentido sul-norte, porque tive a perspicácia de me desviar para a faixa lateral de segurança da autoestrada nos últimos estantes. O Tesla vinha embater na traseira da minha viatura. Aliás, o Tesla quando ultrapassa-me estava minha faixa de rodagem, isto é, na faixa à direita.
E mais, o Tesla não parou nem abrandou a velocidade, continuou como nada se tinha passado.
Com tanta publicidade aos sistema de segurança da Tesla, e face ao que se passou comigo. Já tenho dúvidas sobre a veracidade dos conteúdos noticiosos sobre a Tesla.
Tesla é para esquecer isso com qualquer outra marca nunca iria acontecer. É esperar uns anos e quando existirem mais Teslas nas estrada começam a existir acidentes rodoviários.
É aproveitar as estradas seguras e livre de acidentes enquanto se pode
Caro, a função Autopilot é um adicional no custo do carro, e nem todos querem desembolsar 8k€ para o comprar. A sua situação é um clássico de nabice extrema do condutor do veiculo que não cumpriu as distâncias de segurança que poderia dar mau resultado, o que felizmente não foi o caso.
Provavelmente estaria muito entretido a tentar escolher uma musica no Spotify ou a ver o resumo uma série no Netflix.
Certamente que o condutor iria entretido com algo! Partindo desse princípio, e que a Tesla está muito além. Os acessos às app’s deveriam estar condicionados a quem tivesse os sistemas de condução segura ativos “autopilot”!
Muito sinceramente, temos vindo assistir a uma gradual acréscimo de app’s nas viaturas, sem se questionar o seu contributo negativo na segurança rodoviária!
As Apps como o Netflix, Youtube ou os jogos só funcionam com o carro parado e com o “travão de mão” activado, independentemente da “autonomia” presente no carro. O Spotify está sempre acessível mas isso não é diferente de escolher a música num qualquer outro carro.
O Tesla é muito á frente. Ele previu que te ias desviar e por isso seguiu impávido e sereno 😉
Muito provavelmente!! Ah! Ah!
Qual é a quarta dimensão?
Tempo. Neste caso refere se ao processamento não só em cada frame, mas também ao longo da sequência de frames (tempo).
isso é óbvio, até uma camera de filmar tem essa dimensão, o porquê de “publicitar” que o radar usa o “tempo” é que não percebi, a próxima versão será a 5ª dimensão?
Aqui trata se de processar a informação em continuidade. Por exemplo, se o carro processava 100 frames por segundo, encontrava 100 objectos diferentes em cada segundo. Agora o sistema percebe que aqueles 100 objectos são o mesmo objecto ao longo do tempo. Parece simples, mas adicionar uma dimensão ao processamento requer multiplicar o volume de informação.